Complete the tutorials below in sequence for an educational introduction to robotics based on the IntelliBrain™-Bot educational robot. These tutorials assume prior programming experience. For a more elementary introduction to robotics and computer science, suitable to beginning computer science students, see our Exploring Robotics with the IntelliBrain-Bot book, which includes nearly all of the material in these tutorials.
These tutorials are available from the RidgeSoft store as a printed and spiral bound book.
| |
Tutorial Description |
Tutorial & Other Resources |
 |
IntelliBrain-Bot Assembly Guide
This guide provides detailed instructions that will take you step-by-step through assembling your IntelliBrain-Bot robot. |
IntelliBrain-Bot Assembly Guide 
IntelliBrain-Bot educational robot
|
 |
Creating Your First IntelliBrain Program
This tutorial takes you step-by-step through RoboJDE™ setup and creating and running your first IntelliBrain program. The following topics are covered:
- installing RoboJDE
- configurnig RoboJDE
- creating a project
- building, loading and running your program
- displaying text on the LCD screen
- exercises
|
Creating Your First IntelliBrain Program |
 |
Programming Your Robot to Perform Basic Maneuvers
In addition to teaching you how to program your IntelliBrain-Bot to maneuver, this tutorial will also instruct you on controlling servos and using the API documentation. The topics covered are:
- basics of maneuvering a differential-drive robot
- controlling servo motors
- programming your IntelliBrain from the API documentation
- programming your robot to perform timed maneuvers
- using a for loop to repeat a set of operations
- short-comings of timing-based (open loop) navigation
- exercises
|
Programming Your Robot to Perform Basic Maneuvers
|
 |
Creating a User Interface for Your Robot
By developing a user interface before you get too far into your project, you will be able to easily test and debug your robot's hardware and software as you develop it.
This tutorial covers the following topics:
- implementation of a simple user interface
- application of basic object oriented design principles
- developing software based on requirements
- developing interfaces and classes
- using arrays
- using a while loop
- exception handling
- multi-threading
- Runnable interface
- interfacing the IntelliBrain controller's LCD display, push buttons, thumbwheel and buzzer
- exercises
|
Creating a User Interface to Your Robot |
 |
Creating Shaft Encoders for Wheel Position Sensing
By tracking the positions of its wheels, your robot can keep track of its position and navigate using dead reckoning. Learn how to build shaft encoders to sense wheel positions.
This tutorial covers the following topics:
- infrared photo-reflective sensing
- analog sensor sampling
- analog-to-digital conversion
- collecting and reporting sensor data
- analyzing analog signals
- shaft encoding
- developing interfaces and classes
- using arrays
- multi-threading
- exercises
|
Creating Shaft Encoders for Wheel Position Sensing |
 |
Enabling Your Robot to Keep Track of its Position
Learn how your robot can use shaft encoders, odometry and dead reckoning to keep track of its position.
This tutorial covers the following topics:
- odometry
- localization
- dead reckoning
- applied geometry and trigonometry
- discrete integration
- using shaft encoders
- developing interfaces and classes
- multi-threading
- thread synchronization
- exception handling
- exercises
|
Enabling Your Robot to Keep Track of its Position |
 |
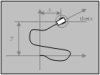
Programming Your Robot to Navigate
Whether you are building the next mars explorer or just a hobby robot, learn how you can program it to navigate.
This tutorial covers the following topics:
- robot navigation
- controlling servo motor speed
- steering differential-drive robots
- proportional control
- tuning controller gain
- way-point navigation
- navigating in geometric patterns
- applied trigonometry
- using interfaces
- multi-threading
- thread synchronization
- exercises
|
Programming Your Robot to Navigate |
